Siłownik zaworu typu AV i Siłownik klapy typu AD
regulowane analogowymi sygnałami I/O
 CHARAKTERYSTYKA:
CHARAKTERYSTYKA:
-
kompatybilny z BMS I/O
-
elektroniczna regulacja funkcji stopu
-
martwa strefa zapewniająca stałą regulację
-
możliwe opcje:
- napięcie lub prąd dla sygnałów I/O
- osobne zasilanie elektroniki
- zasilanie nadajnika na żądanie
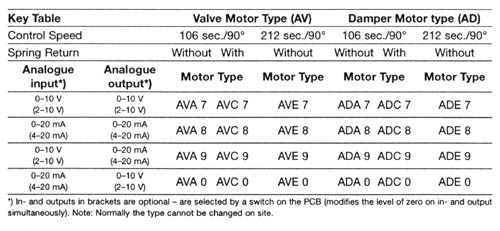
- regulacja szybkości 106s. lub 212s/90°
- sprężyna zamykająca, odwracalna
ZASTOSOWANIE:
Siłowniki analogowe typu AV i AD bazują na siłowniku 24V i siłowniku
regulacyjnym typu D, ale regulowane są elektronicznie (także funkcja
stop), co pozwala na wyeliminowanie przycisków. Regulacja może być prowadzona
w systemie BMS (Building Managment System) z analogowymi końcówkami.
Patrz także karty katalogowe dla siłowników V i D nr 4.8.01 i 4.9.01.
BUDOWA:
Siłownik jest z silnikiem 24 VAC, odwracalnym, jednofazowym, zsynchronizowanym
z kondesatorem rozruchu. Napęd umieszczony jest w skrzynce z wysokociśnie
niowego aluminium. Koła napędowe i łożyska nie wymagają smarowania,
a części elektroniczne przykryte są samogaszącym plastikiem. Siłownik
może być dostarczony wraz ze sprężyną zamykającą, która zostaje zwolniona
w przypadku odcięcia dopływu prądu lub impulsu pochodzącego od bezpiecznika.
Sprężyna znajduje się w obudowie cylindrycznej na głównej krzywce i
całkowicie otwiera lub zamyka zawór w zależności od pozycji obudowy
na krzywce. Gdy siłownik montowany jest ze sprężyną, moment obrotowy
/ się a zamykająca w niektórych przypadkach jest mniejsza - patrz dane
techniczne, tabela i wyposażenie dodatkowe na odwrocie. Włączanie i
wyłączanie następuje elektromagnetycznie przy pomocy mechanizmu sprężynowego
wystającego z elementu pośredniczące w przekładni w przypadku odcięcia
dopływu prądu. Gdy tylko prąd znów przepływa, magnes ustawia z powrotem
napęd, a siłownik natychmiast ustawia się w pozycji zadanej przez regulator.
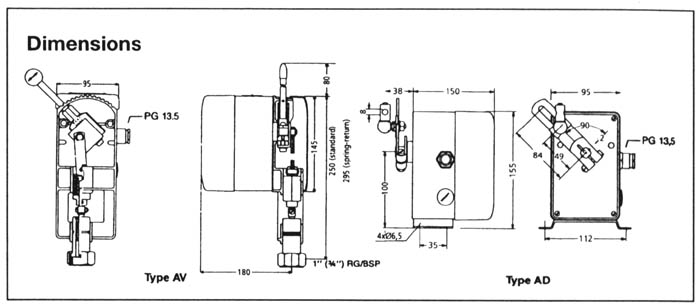
MECHANIZM TYPU AV:
Mechanizm korbowy powoduje skok zaworu poprzez zamianę kąta obrotu w
ruch liniowy pomiędzy 4 a 20 mm tak, aby być przystosowany do wysokości
podnoszenia zaworu. Korba posiada zapadkę, która zostaje uruchomiona
przy pomocy dźwigni, powoduje ona zwolnienie siłownika i napędu, a zawór
może być obsługiwany ręcznie. Dźwignia może być ustawiana w różnych
pozycjach w zależności od żądanego natężenia przepływu. Siłownik posiada
dławnicę z teflonową uszczelką, nie ma części miedziowych, więc może
pracować w systemach olejowych bez ryzyka krackingu. Dławnicę można
wymienić jako jedną część. Sprężyna bezpieczeństwa pomiędzy dławnicą
a mechanizmem korbowym zabezpiecza przed przeciążeniem.
FUNKCJE:
Regulatory elektroniczne porównują sygnały analogowe z systemu BMS lub
regulatora z wewnętrzną wartością odniesienia generowaną przez potencjometr,
odczytującą pozycję krzywki siłownika. Gdy sygnał regulacyjny nie zgadza
się z wartością wewnętrznego odniesienia, siłownik działa, przywracając
naruszoną równowagę. Wbudowana martwa strefa wynosi 4% całkowitego zakresu
regulacji. Tak długo, dopóki różnice sygnałów nie przekroczą tej wartości
siłownik będzie nieruchomy. Do wskazania pozycji, wyjście analogowe
generuje sygnał dla krzywki siłownika. Gdy siłownik osiągnie zadaną
pozycję, wejścia i wyjścia analogowe znajdują się w równowadze. Regulatory
elektroniczne zwykle zasilane są poprzez siłownik 24VAC ale mogą być
też zasilane osobno, aby osiągnąć galwaniczną rozdzielność. Tam gdzie
żądane jest zasilanie zewnętrznego przekaźnika 4-20 mA, poprzez krótki
obwód, dostarczamy końcówką wyjścia dla 17V / 20mA. Oferujemy wiele
typów regulatorów, aby zapewnić różne standardy dla sygnałów analogowych
w systemach BMS i regulatorach tradycyjnych. Np.: Gdy wybierzemy sygnał
2-10V, siłownik zacznie się zamykać przy sygnale 2V. Gdy sygnał zostanie
podniesiony do 10V, siłownik zacznie się otwierać, natomiast przy 6V,
znajdzie się w środku. Regulator elektroniczny funkcji stop rozłącza
siłownik i napęd poprzez potencjometr pozycyjny chroniąc tym samym siłownik
przed przeciążeniem, gdyby sygnał przekroczył limit poniżej 2V lub powyżej
10V w powyższym przykładzie.
| Zasilanie: | 24V AC +10% -15%, 50Hz 7VA (12VA ze sprężyną zamykającą) | |
| Wejście analogowe: | ||
| Z napięciem | - typ AXX7 i AXX8 | |
| Pozycja zamknięta | 0 V (2 V7)) | |
| Pozycja otwarta | 10 V | |
| Martwa strefa | +/-40 mV | |
| Opór wejścia | ok.100 kW | |
| Max. napięcie wejścia | 40 V | |
| Z prądem - typ AXX0 i AXX8 | ||
| Pozycja zamknięta | 0 mA (4 mA7)) | |
| Pozycja otwarta | 20 mA | |
| Martwa strefa | +/-0,08 mA | |
| Opór wejścia | 250 W | |
| Max wartości | 40 mA, 10 V | |
| Wyjście analogowe: | ||
| Bez napięcia - typ AXX0 i AXX7 | ||
| Pozycja zamknięta | 0 V (2 V7)) | |
| Pozycja otwarta | 10 V | |
| Opór wejścia | 500 W | |
| Bez prądu - typ AXX8 i AXX9 | ||
| Pozycja zamknięta | 0 mA (4 mA7)) | |
| Pozycja otwarta | 20 mA | |
| Opór wejścia | Max 500 W | |
| Wyjście zasilania: | ||
| Zabezpieczenia ewentualnego przekaźnika przed zwarciem | ||
| Napięcie | 17 V +/- 2 V | |
| Prąd | min 20mA max 30mA | |
| Opór wyjścia | ok. 100 W | |
| Opcje zasilania elektroniki: | ||
| 24 V DC +20% -10% max 100 mA lub 24 V AC +10% -15% max 3 VA | ||
| Inne dane wspólne: | ||
| Obudowa | IP44 | |
| Szybkość regulacji | 106 lub 212 s/90° | |
| Szybkość zamykania | kilka sekund | |
| Temperatura otoczenia | -15 do 60°C | |
| Siłownik typu AV: | ||
| Siła zamknięcia | 1200N50 | |
| Skok (regulowany) | 4-20mm | |
| Montaż | pionowo do góry lub na dół | |
| Waga | 2,7kg (3,7kg ze sprężyną zamykającą) | |
| Opcje: | ||
| - Sprężyna zamykająca zamyka / otwiera
zawór przy braku prądu - Przekaźnik czasowy zabezpiecza koła napędowe tam, gdzie zdarzają się krótkotrwałe zaniki zasilania - Wspornik wspomaga siłownik tam, gdzie występują mocne drgania. |
||
| Siłownik regulacyjny AD: | ||
| Moment obrotowy | 20 Nm (8Nm z sprężyną zamykającą) | |
| Kąt obrotu | 90° | |
| Dostarczany z płytką mocującą, śrubami, dźwignią, łożysko dla max 8mm cięgła | ||
| Montaż | dowolnie | |
| Waga | 2,2kg (3,2kg z sprężyną zamykającą) | |
| Opcje | ||
| Sprężyna zamykająca zamyka / otwiera zawór przy braku prądu Połączenia dla zaworów klapowych. | ||
|
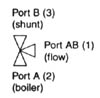
zawór mieszający
|
zawór rozdzielający
|
|
| 1) napęd: |
zamknięty przepływ A(2)
|
otwarty przepływ B(3)
|
|
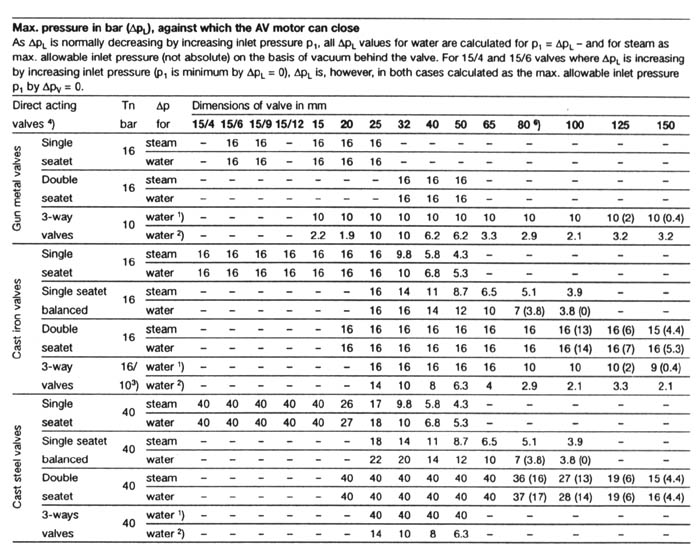
DpL:
|
pA-pB
(p2-p1)
|
pA-pAB
(p1-p3)
|
| 2) sprężyna |
zamknięty przepływ B(3)
|
otwarty przepływ A(2)
|
|
DpL:
|
pB-pAB
(p3-p1)
|
pAB-pA
(p1-p2)
|
| 3) | PN 16 dla zaworów < 80 mm | |
| PN10 dla pozostałych zaworów | ||
| 4) | W przypadku zastosowania
innych zaworów prosimy o kontakt Figury są prawidłowe dla napędów zaworów ze sprężyną powrotną. |
|
| 5) | Obecność sprężyny zamykającej zdolność zamykania lub otwierania zmniejsza się w konkretnych przypadkach (wartości w nawiasach) | |
| 6) | Wartości w tabeli odnoszą się także dla 80/100mm (M2F i H2F - kvs = 110) | |
| 7) | Patrz uwaga 1 na odwrocie | |
| Przedsiębiorstwo Consultingowo-Handlowe "AS" | |
| 82-300 Elbląg |
ul. Skrzydlata 28
|
| tel. (55) 2325172 |
fax (55) 2326595
|
